
 产品:16
产品:16
 联系我们
联系我们

数据的保存
将控制器内部存储器的数据保存到 USB 存储器中。
数据被保存在 USB 存储器根目录下的“YAMAHA”文件夹中。
要点:
如果内部存储器由于某种原因被损坏,则可以将保存在 USB 存储器内的数据复原至控制器内部存储器中。
建议在机器人控制器作为系统开始运行时保存。
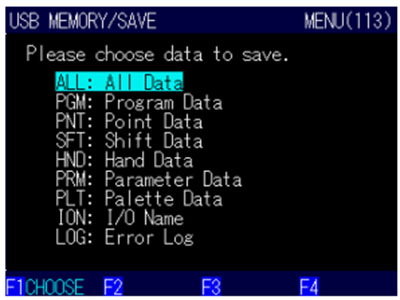
1. 按下 F1 键 (SAVE)。
显示要保存的数据种类。

2. 选择要保存的数据种类。
请通过光标键选择要保存的数据种类,然后按下 F1
键 (CHOOSE)。
显示保存文件一览。
3. 选择要保存的文件。
当新建文件保存时,请按下 F1 键 (CHOOSE) 。按
照下列步骤输入文件名。
当进行覆盖保存时,请通过光标键选择要保
存的文件,然后按下 F1 键 (CHOOSE) 或者回
车键。
当所保存的文件数量较多时,请按下 F2 键 (NEXT),
显示文件一览(续)。
4. 保存文件。
输入要保存文件的文件名。
当保存新建文件时,请输入新的文件名。
当覆盖已有文件时,请输入已有的文件名。
按下回车键,文件被保存到 USB 存储器中。
按下 ESC 键,取消保存。
保存过程中将显示“Now Saving”的信息。
5. 注意:
如果 USB 存储器以及所保存的数据中发生了故障(如破损、错误等),则无法进行数据复原。请务必在个 人电脑等外部存储装置中也保存数据。
如果在保存数据的过程中发生了异常处理(如电源断电等),则所保存的数据无法得到保证。
无法保存其它参数的“不加载未定义参数”项目。
数据的读取
将保存在 USB 存储器内的数据复原至控制器的内部存储器中。
数据必须保存在 USB 存储器根目录下的“YAMAHA”文件夹中。
要点:
如果内部存储器因某种原因被损坏时,可将保存在 USB 存储器内的数据复原至控制器的内部存储器中。
建议在机器人控制器作为系统开始运行时保存。
1. 按下 F2 键 (LOAD)。
将显示数据的种类。
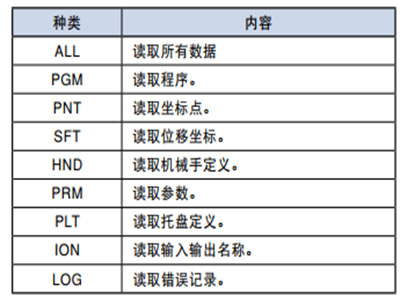
2. 选择要读取的数据种类。
请通过光标键选择要加载的数据种类,然后按下 F1
键 (CHOOSE)。
显示可读取的文件。

3. 选择要读取文件。
请通过光标键选择要加载的文件,然后按下 F1 键
(CHOOSE)。
将显示确认信息。
如果所保存的文件数量较多,请按下 F2 键 (NEXT),
显示文件一览(续)。
更多点击雅马哈机器人
- 下一篇:雅马哈机器人码垛机型的优势
- 上一篇:我国机器人产业面临的挑战